

Laser-powered Drones for Wireless Communication: An Energy-aware Trajectory Planning
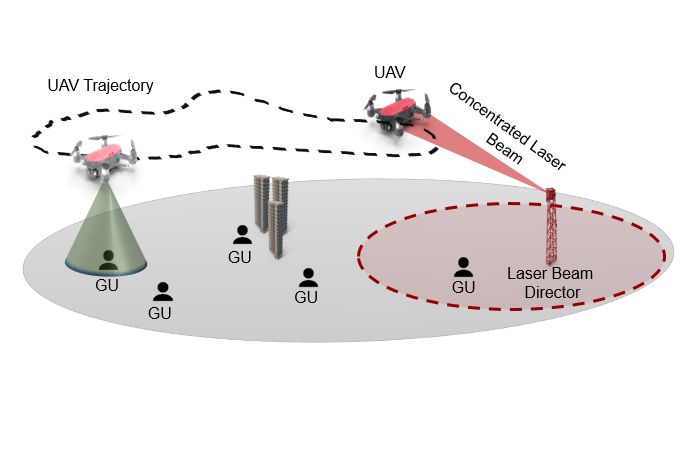
Recent advances in the drone industry have led to increased interest in using unmanned aerial vehicles (UAVs) for wireless communication purposes. However, limited power remains the big issue, as in such missions, endurance is of paramount importance. In this context, free-space optics (FSO) seems to not only offer a way to transfer high data rates but also a key technology to provide energy to flying platforms. Laser beaming was recently used to provide power supply to drones and hence extend their mission time. In this thesis, we study a laser-powered drone-assisted data collection from ground users. We focus on designing the UAV trajectory based on the trade-off between communication and energy harvesting. To this end, we use optimization and deep reinforcement learning (DRL) techniques to provide an efficient solution for the problem.
Thesis Objectives
- Conduct a comprehensive literature review.
- Model the system and quantify the energy harvested by the UAV photo-diode (PD) receiver, taking into account optical turbulence effects and misalignment and pointing errors.
- Propose adequate formulation of the problem in terms of Partially Observable Markov Decision Process (linking the reward to energy and communication).
- Implementing an efficient trajectory planning for the drone.
- Analyzing and discussing the performance of the proposed solution.
If successful, this work may lead to a journal and/or a conference paper.
Prerequisites
- Basic knowledge of wireless communication and optimization.
- Basic knowledge of Deep Reinforcement Learning.
- Programming skills Programming skills in MATLAB (and preferably in Python).
Contact
Further Details
The use of small drones has recently attracted the attention of researchers due to their multiple striking features such as their high mobility and ability to establish line-of-sight (LOS) links with the ground. This is directly reflected by the wide range of UAV applications, for instance, agriculture, surveillance, and traffic control. In this context, the wireless communication research community is also interested in using drones to provide and extend connectivity. This can be achieved by using drones as users, flying base stations, or relays. Among the main challenges on the road to adopting UAVs as reliable wireless access points are the limited energy resources and the need to revisit ground stations to recharge the UAV battery. Recently, laser beaming, supported by experiments, has shown great potential to provide energy for UAVs and increase their flight duration. Several companies have begun to provide working prototypes of this technology and have successfully powered a drone for over 48 hours [1]. For instance, PowerLight Technologies with the cooperation of US Naval Research Laboratories launched the third phase of the project PTROL which delivers high power to lightweight drone optical receiver. While this technique solves the energy constraint issues, it opens up other challenges related to the turbulence effect, misalignment effect, safety, and energy efficiency challenges. Although this technology looks promising, the current literature on this topic is still immature. Authors have maximized the data throughput for laser-powered drones in [2], while performance analysis for simultaneous energy and information transfer was provided in [3]. Moreover, DRL gained success in many applications through combining artificial neural networks (ANN) with the classical concepts of reinforcement learning (RL). In this context, drone-based trajectory planning has been solved based on different discrete and continuous DRL algorithms [4].
References
[1] T. Nugent and J. Kare, “Laser power for UAVs,” Laser Motive White Paper-Power Beaming for UAVs, 2010.
[2] J. Ouyang, Y. Che, J. Xu, and K. Wu, “Throughput maximization for laser-powered UAV wireless communication systems,” in 2018 IEEE International Conference on Communications Workshops (ICC Workshops), 2018, pp. 1–6.
[3] M.-A. Lahmeri, M. A. Kishk, and M.-S. Alouini, “Stochastic geometry-based analysis of airborne base stations with laser-powered UAVs,” IEEE Communications Letters, vol. 24, no. 1, pp. 173–177, 2019.
[4] ——, “Artificial intelligence for UAV-enabled wireless networks: A survey,” IEEE Open Journal of the Communications Society, vol. 2, pp. 1015–1040, 2021.